When we measure the length of something or the time for something to happen, we are measuring these things as we see them. We take a rule or tape measure, line one end with the object and use the other to get a measurement, and with a stopwatch we can start and stop the watch to coincide with the beginning and end of the process in question.
For a long time, people believed that everyone would record the same values, no matter their position and velocity relative to us.
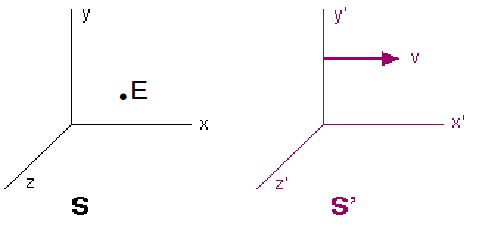
This is not in fact so, and makes the concept of 'frames of reference' so important. A frame of reference is simply an environment in which measurements are made. We can all think of ourselves being at rest in our own frame of reference, and as any frame of reference as being a three dimensional coordinate system, on which we can measure positions of events and distances, along with a clock on which we can record time and time intervals.
There is a special class of frames of reference called inertial frames of reference. These are frames of reference with constant velocities, so that the frame itself is not accelerating. Between any two inertial frames of reference, we can to a good approximation use the Galilean Transformation to find coordinates, times in one inertial frame for any event E, and distances and times too, if we have these values in the other.